Coordinate Transformations
Representing a Point in Space
A point
Let's consider two different coordinate frames, {A} and {B}.
- A point
described in frame {A} is denoted by the vector . - The same point
described in frame {B} is denoted by the vector .
Each vector is just a set of three coordinates that locate the point
Rigid Body Transformations
When we talk about transformations, we're often dealing with rigid bodies. This means the object itself doesn't bend or deform; it only changes its position (translation) and orientation (rotation) in space.
- Translation: Describes the movement of a point from one location to another. We can represent this by adding a translation vector.
- Rotation: Describes the change in orientation of a frame. This is more complex and requires a rotation matrix.
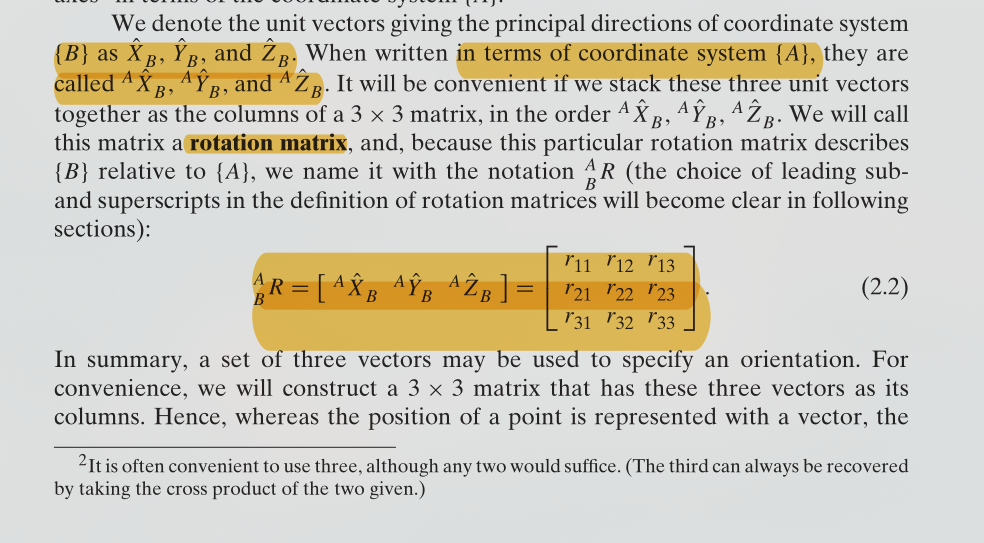
Rotation Matrix
A rotation matrix describes the orientation of one coordinate frame with respect to another. ( This statement might not always hold btw)
The notation
This equation takes a point described in frame {B} (
Deriving the Rotation Matrix
How do we find the values inside
Let the unit vectors for frame {A} be
The matrix
Each of those column vectors can be found by projecting the {B} unit vectors onto the {A} axes:
Coordinate Transformations
Representing a Point in Space
A point
Let's consider two different coordinate frames, {A} and {B}.
- A point
described in frame {A} is denoted by the vector . - The same point
described in frame {B} is denoted by the vector .
Each vector is just a set of three coordinates that locate the point
Rigid Body Transformations
When we talk about transformations, we're often dealing with rigid bodies. This means the object itself doesn't bend or deform; it only changes its position (translation) and orientation (rotation) in space. A transformation is a way of mapping points from one frame to another
- Translation: Describes the movement of a point from one location to another.
- Rotation: Describes the change in orientation of a frame.
Rotation Matrix
The primary tool for handling rotations is the rotation matrix. A rotation matrix describes the orientation of one coordinate frame with respect to another.
The notation
(Craig, 2014, Eq. 2.13)
This equation takes a point described in frame {B} (
Deriving the Rotation Matrix
The matrix
Let the unit vectors for frame {A} be
Each column vector is found by projecting the {B} unit vectors onto the {A} axes. This means the components of the rotation matrix are the dot products of the unit vectors of the two frames
(Craig, 2014, Eq. 2.3)
Properties of a Rotation Matrix
- The matrix is orthogonal. Its columns (and rows) are mutually orthogonal unit vectors.
- The inverse of a rotation matrix is equal to its transpose.
- The determinant is always +1.
now go read chapter 2 JJ Craig